

Researchers at the Harvard university developed an autonomous soft robot that mimics the movement of real octopuses.
 The Octobot soft robot consists completely of soft materials and runs autonomously. These materials are produced with a new technique called by the researchers EMD3D (embedded 3D printing technique). The works of the researchers is available on the recent release of Nature.
The Octobot soft robot consists completely of soft materials and runs autonomously. These materials are produced with a new technique called by the researchers EMD3D (embedded 3D printing technique). The works of the researchers is available on the recent release of Nature.
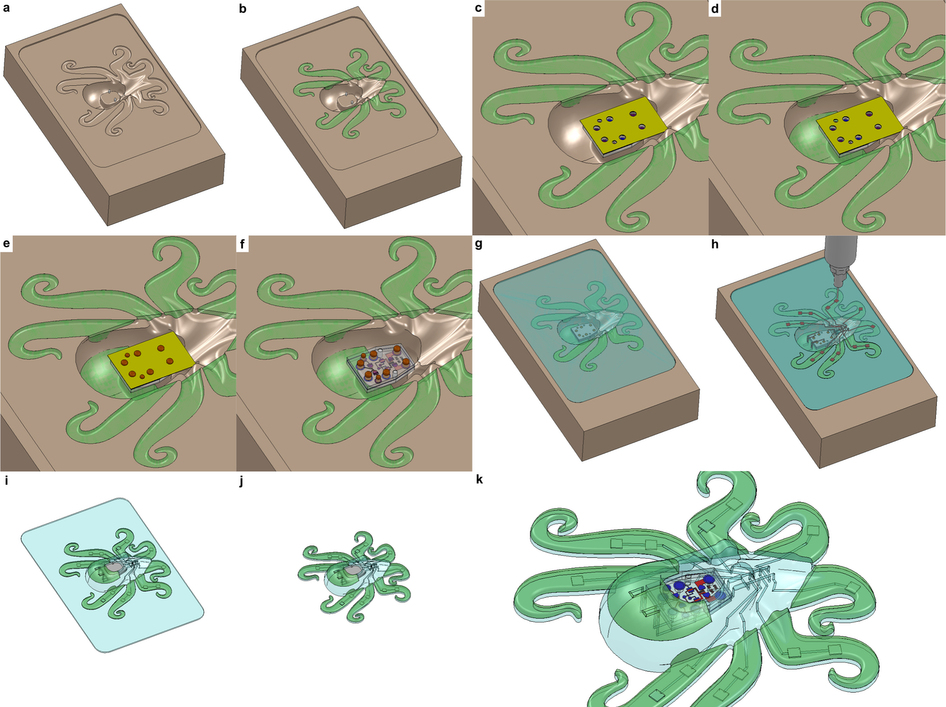
All steps of the production process to the picture above:
a, An EMB3D printing mould is machined from acetal. b, The hyperelastic layers needed for actuation are cast and cross-linked in the actuator regions of the mould. c, A soft controller protected with a polyimide tape mask is loaded onto the pins of the EMB3D printing mould. d, The fuel reservoir matrix material is carefully loaded into the fuel reservoir area of the mould and degassed under vacuum. e, Liquefied fugitive plug material is manually loaded into the soft controller via the inlets and briefly degassed. f, The protective tape is removed after the fugitive plug material physically gels, and the fugitive plug is photo-cross-linked. g, The body matrix material is cast into the mould and degassed. h, Any excess body matrix material is removed with a squeegee step, EMB3D printing begins, and the entire mould and EMB3D-printed materials are placed in a 90 °C oven to cross-link. i, After 2 h, the cross-linked octobot is removed from its mould and kept at 90 °C for a total of 4 days to ensure complete auto-evacuation of the aqueous fugitive inks. j, Before operation, excess body matrix material is removed via laser cutting. k, The final octobot, shown here in a close-up view, is prepared for operation.
Other than the recently showed stingray robot the Octobot is completely autonomous and consists of soft materials.
Subscribe to our Newsletter
3DPresso is a weekly newsletter that links to the most exciting global stories from the 3D printing and additive manufacturing industry.

















